In the innovative landscape of storage solutions, Ryussi Technologies proudly introduces the second installment of our enlightening interview with Dr. Sunu Engineer, CTO, discussing the pioneering MoSMB architecture. With a keen focus on SMB3 (“Server Message Block version 3”), MoSMB is at the forefront of enabling storage systems to effortlessly incorporate the latest advancements in network file sharing protocols. Here, we delve into the core architectural elements that set MoSMB apart, establishing it as the preferred choice for companies aiming to leverage SMB3.0’s robust capabilities.
Top Three Architectural Features of MoSMB
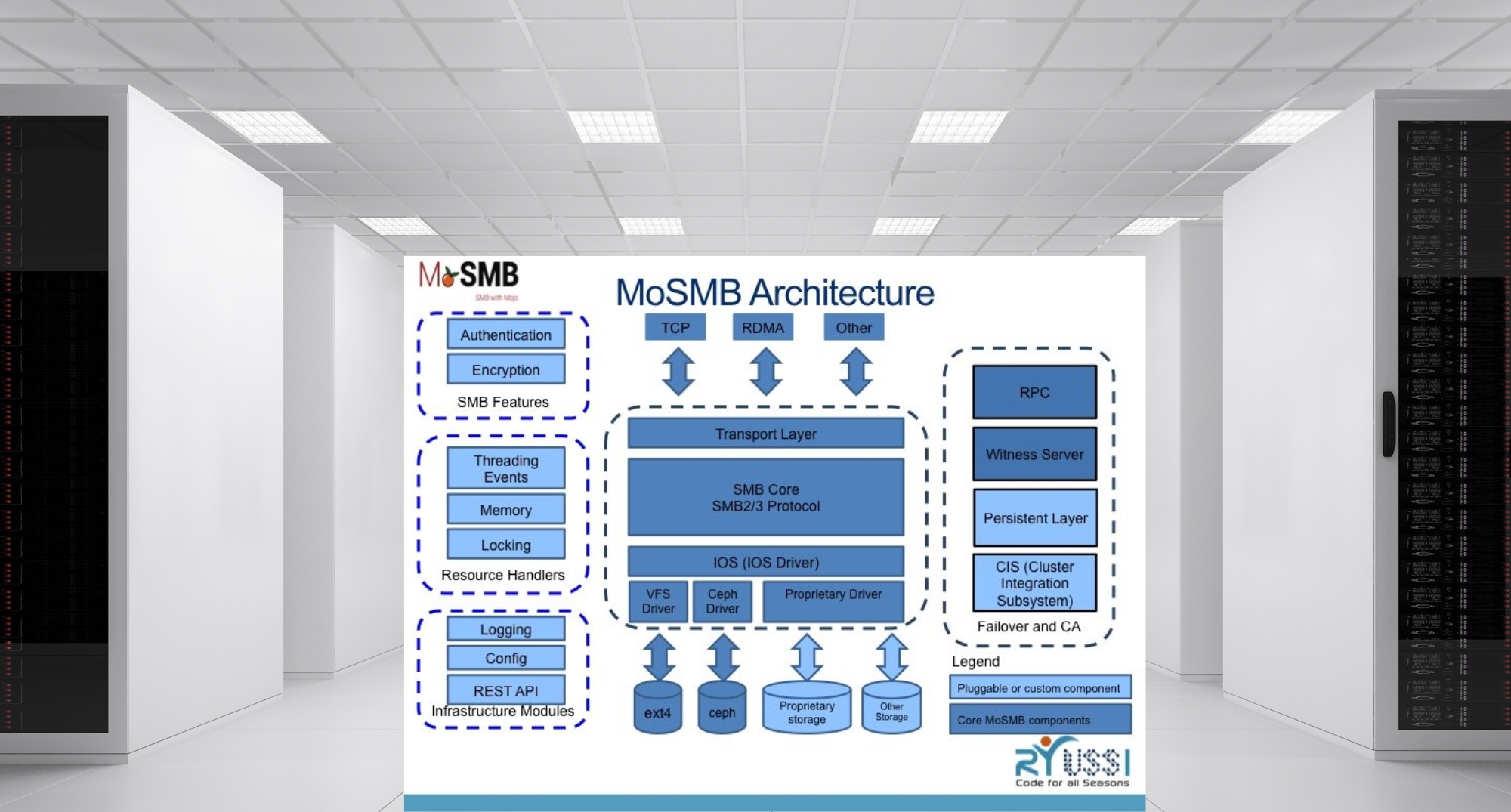
1. Pluggability: MoSMB’s standout feature lies in its versatility. Designed as a comprehensive suite of libraries rather than a traditional monolithic server, it seamlessly integrates with any storage or cluster system. This pluggable nature is a testament to MoSMB’s adaptability, making it an unrivaled differentiator in the SMB space.
2. Scalability: Embracing modern architectural principles, MoSMB exemplifies scalability and efficiency. Its event-based, distributed server architecture enables peer-to-peer file sharing, allowing vendors to integrate MoSMB into their devices without hassle, propelling SMB3.0 integration to new heights.
3. Protection of Intellectual Property: As a closed-source solution, MoSMB ensures the safeguarding of clients’ intellectual property. Unlike open-source alternatives like SAMBA, MoSMB does not require clients to disclose their system internals. This level of protection, combined with Ryussi’s software services, offers an unparalleled advantage in implementing and optimizing MoSMB within storage ecosystems, all while securing clients’ proprietary technologies.
Enhanced IO Driver Support
MoSMB’s architecture is designed around flexibility in IO systems, supporting multiple types through a unified device driver interface. This approach, mirroring the versatility seen in Linux/Unix VFS models, allows for the customization of IO drivers to match specific storage system requirements. Creating an IO driver, even for complex distributed object stores, is streamlined, enabling rapid development and integration within vendor environments.
Seamless Clustering Integration with SMB3
A critical aspect of MoSMB’s architecture is its advanced support for transparent failover scenarios, a key feature of SMB3.0, through the Witness protocol. This mechanism significantly reduces failover times by alerting Hyper-V servers instantly about node unavailability, eliminating the traditional connection timeout delays. MoSMB’s clustering capabilities are further enhanced by a proprietary shared memory structure and the option to utilize an internal RAFT-based library for clients seeking a robust distributed synchronization solution.
Elevate Your Storage Solutions with MoSMB and SMB3
MoSMB‘s unique blend of pluggability, scalability, and IP protection, paired with comprehensive support for SMB3.0, positions it as the ideal architecture for storage companies looking to upgrade their systems. Ryussi Technologies is not just innovating with MoSMB; we’re revolutionizing the way storage solutions embrace the future of file sharing protocols.
Are you ready to unlock the full potential of SMB3.0 in your storage solutions? Contact Ryussi Technologies today to learn how MoSMB can transform your storage systems, ensuring a seamless, scalable, and secure data sharing environment.
Embrace the future of storage with MoSMB and SMB3 – Get in touch now!